Blog Entries
Our team deliverables and checkpoints are specified in the linked pdf file and give an understanding of how we organized the project schedule.

5.25.16 - Grading Session
- Put the bumper on the bot
- Sewed on new sturdier straps for better arm support on the PAC
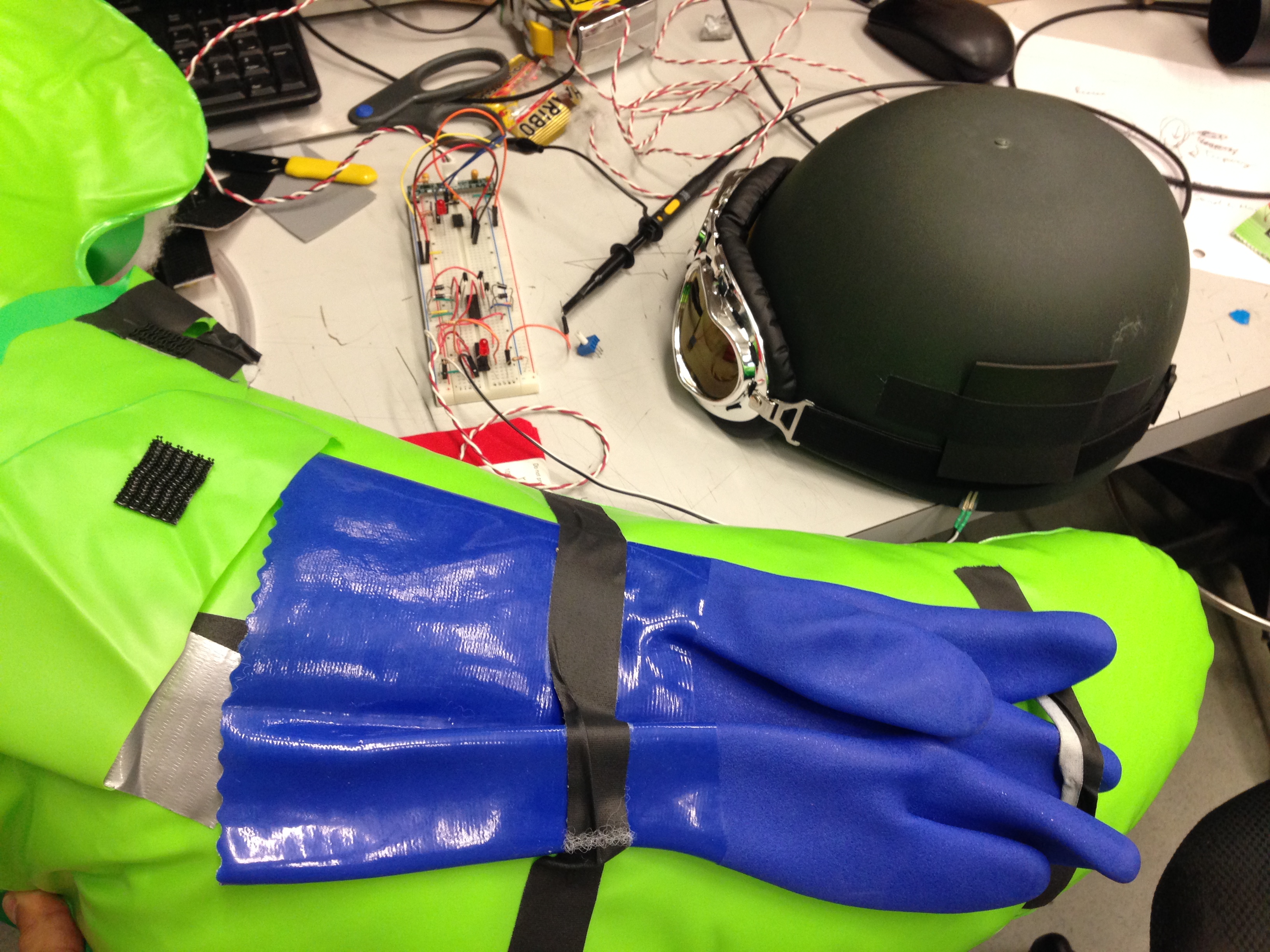
- Improved the range for the sunglasses on the DMC
- Our team got the check-off in the grading session on our first try!
5.24.16 - Final Assembly
- After some assembly, we finally put together the bot in its entirety and drove it around
- We love the pairing actions, lights, and swimming flippers

5.23.16 - Finishing Mechanical, Electrical, Software
- Redid the code on the DMC so we can have finer resolution on the step size for the DMC using purely software generated PWM for both servos
- Tested pairing and communication sequence with multiple teams
5.22.16 - LEDs on DMC fix
- Fixed the pair/R-B color sequence coming from DMC
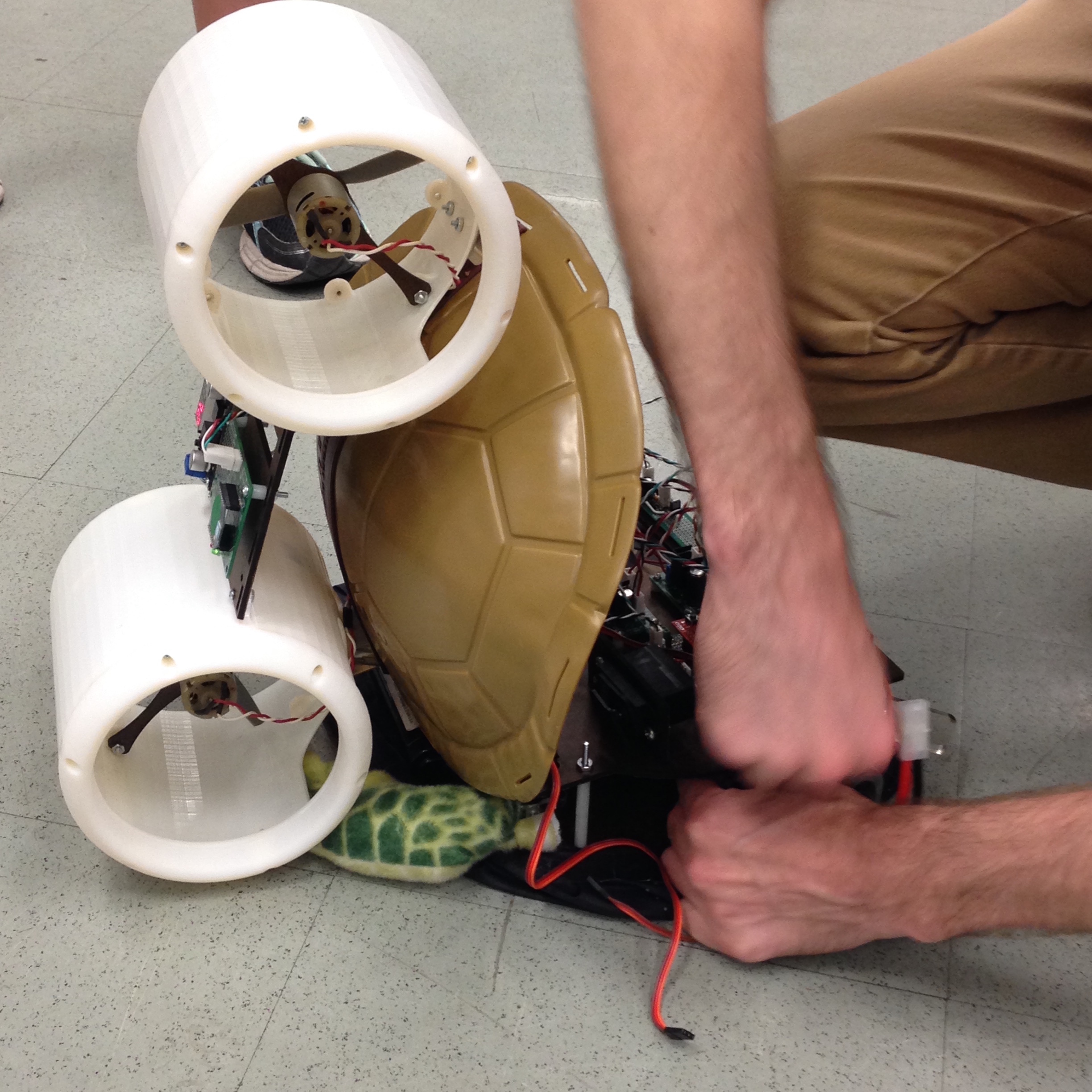
5.19.16 - LOBBYIST Integrations
- Integrated half of the jet packs, one of the flippers, and the shell onto the LOBBYIST
- Luke figured out a great way to make all the electronics accessible - by attaching the shell with magnets and a hinge - so now we can debug like car mechanics
- We were able to do another test-run but out batteries were low! Until next time!
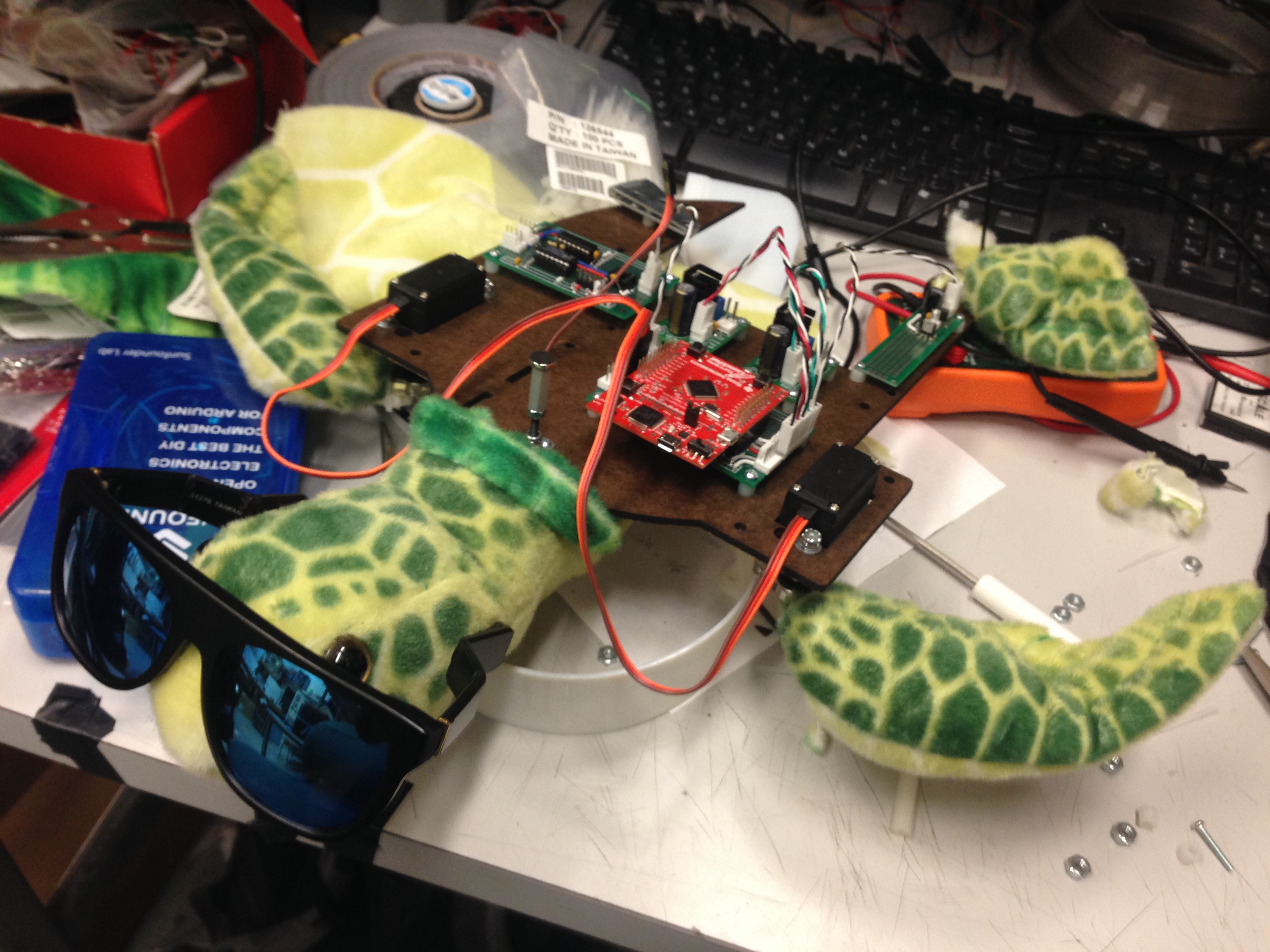
5.18.16 - DMC Prototype
- Prototyped the functionality and form factor for the DMC
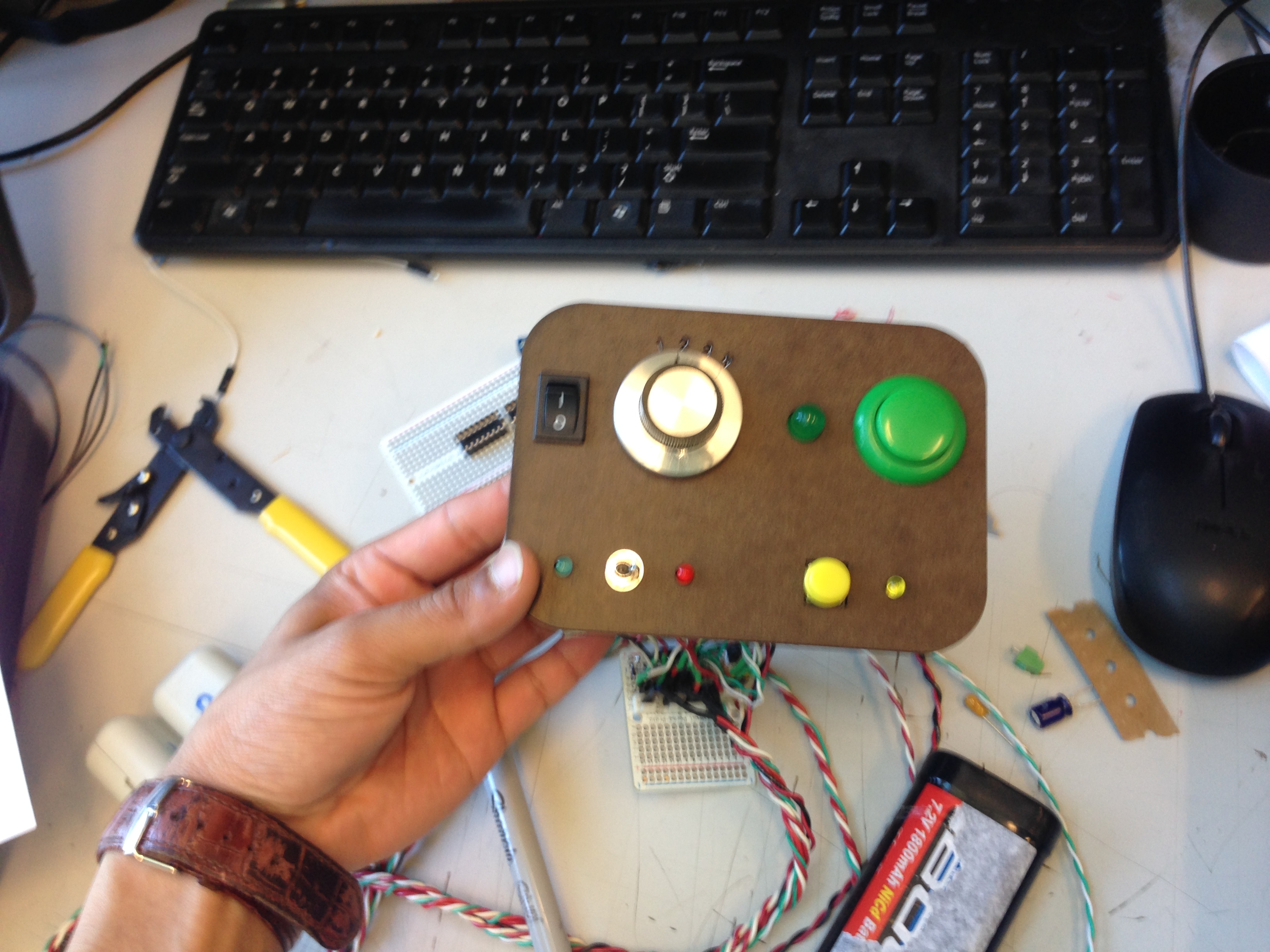
- Revised the front panel UI for the PAC
- Decided to place the PAC electronics within the arm to avoid putting them on the helmet
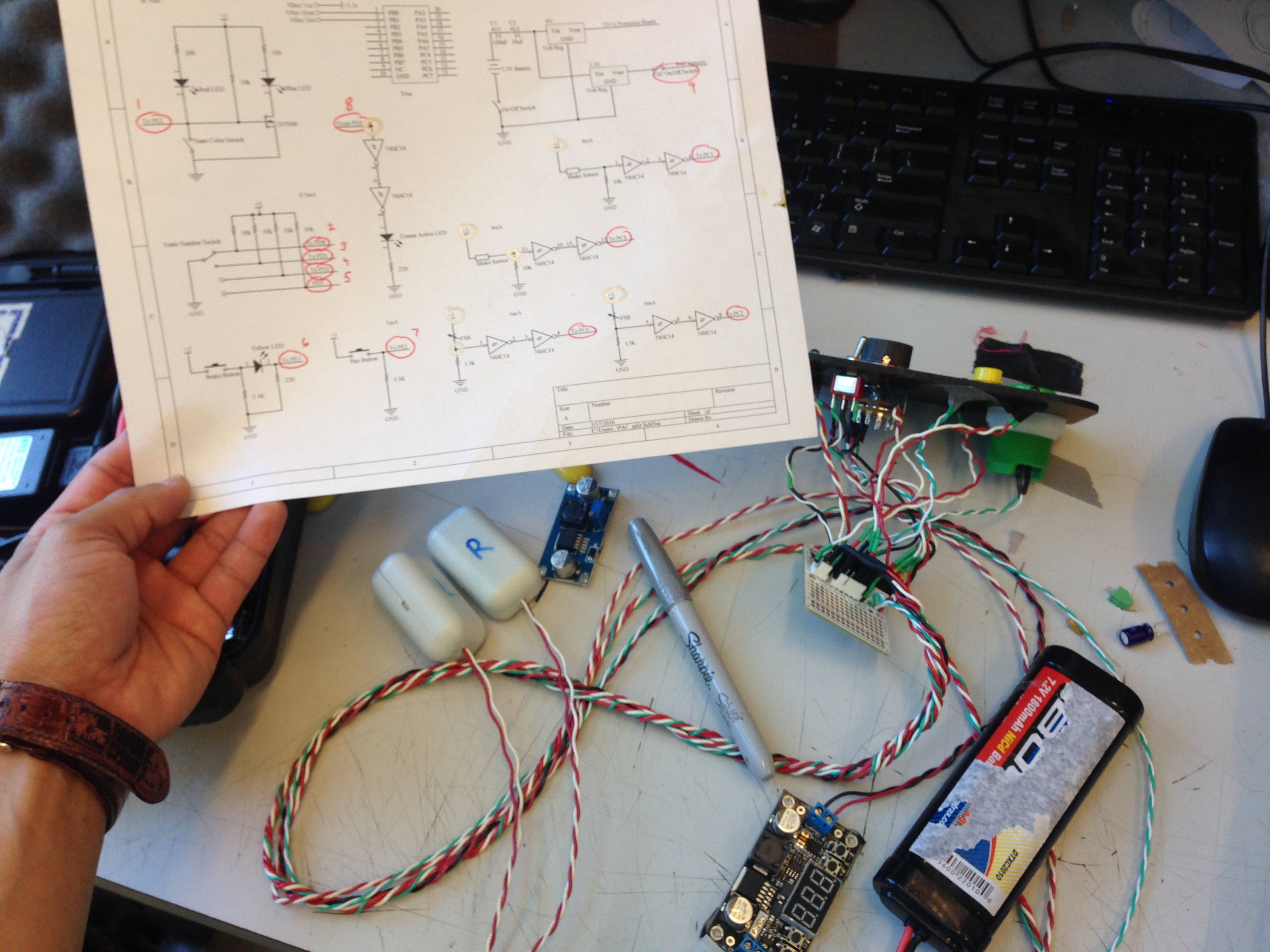
5.17.16 - Finalizing PAC, Testing
- Finalized the PAC electronics design, soldered the boards, and made the harness and prototype UI panel for the control buttons and switches. Look Ed, we do use the schematics to make the boards!
5.16.16 - Communications Protocol Between PAC and Lobbyist, PAC Electronics
- Established the final communications between the PAC and Lobbyist
- Encountered some issues when designing the boards for the PAC - the electronics would have to be split between the main control board with the Tiva and XBee and the actual I/O in the the arms
- Revised the PAC electronics design to reflect the final integration
- Successfully steered the Lobbyist forward, backward, left, and right using the PAC and wireless communication
- Created first prototype of integrated PAC - we realized we probably should find a better place for the electronics than on the helmet, but it's still fun to feel like a mad scientist for a bit


5.15.16 - Push for Final Hardware
- Finished sewing the PAC straps
- Developed plan to fabricate and integrate final mechanical hardware
5.14.16 - More PAC Constructions, Revised Skirt Test
- Tested the new skirt and it works great! We just have to make sure the weight is balanced or it will try to lift itself up! It’s also important that there is an air-tight seal on the top and bottom edge where the nylon meets the base material
- Sewed one of the PAC arms where the handle is to reinforce the tube
5.13.16 - Jet Pack CAD Revision, PAC Construction
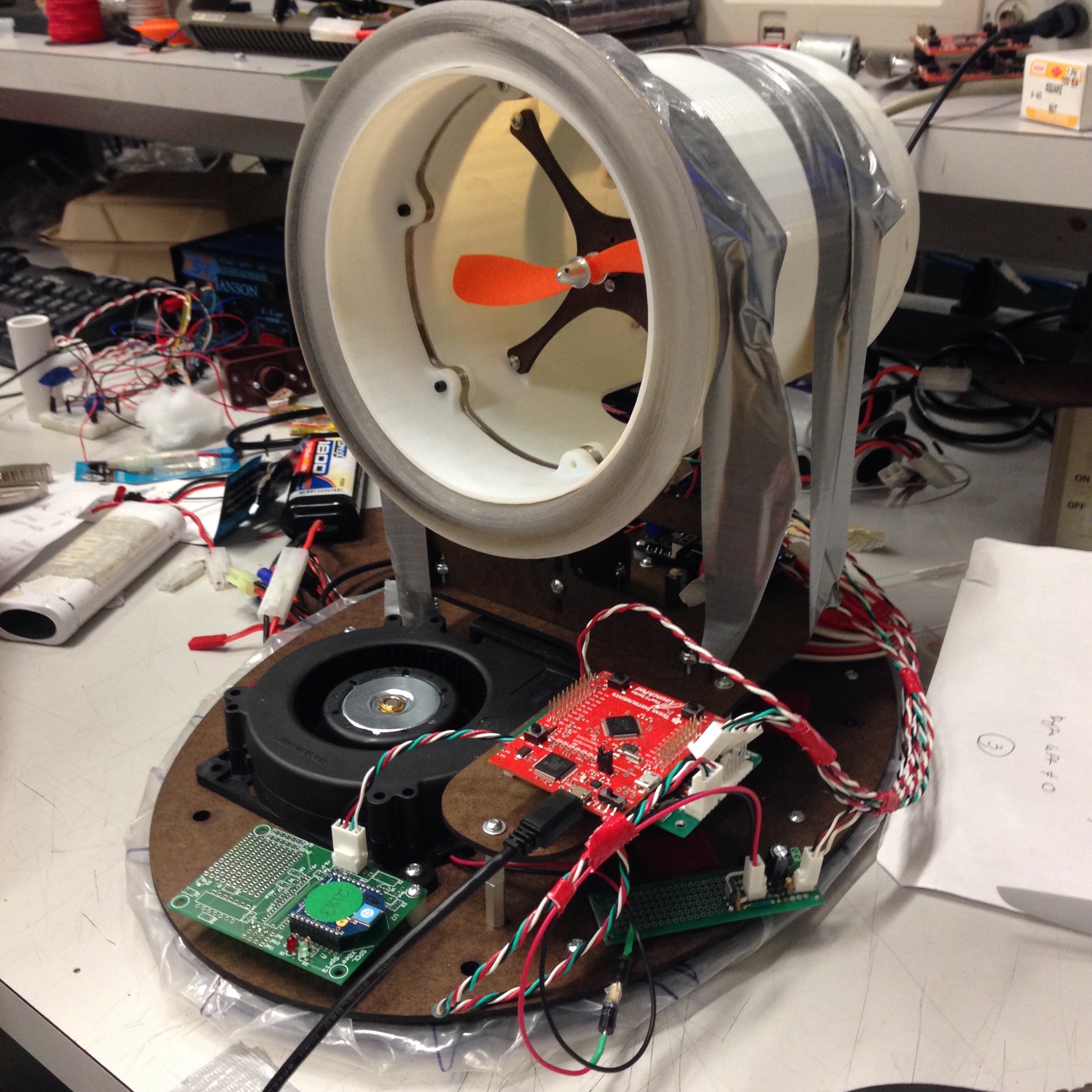
- Changed the jet pack on the turtle into a turbine since the thrust fans performed much better without the cone (as expected)
- Revised the CAD for the LED diffuser so that it has a constant 1.7mm wall thickness. This should give us the desired diffused light effect we’re after
- Lasercut new hovercraft bottom plate for testing new skirt design, as well as simple mounts for the arms that will be driven by servos
- Attached the handles and straps to the PAC arms, and the FSRs to the helmet
- Changed the Medium Shake Sensor to a Fast Shake Sensor - this helps solve the issue of the user’s arm getting tired when flailing his or her arms, and also allows to control the hovercraft with a swim-like motion.
- Put the sensors in a pill box enclosure for robustness and to dampen the sensor a bit

5.12.16 - More PAC & Jet Pack Prototyping, Comms
- Tested one of the jet packs with a thrust fan and prop
- It works well with the front cap off
- Created a close-to-final version of the helmet/reverse command for the PAC
- Finalized design for PAC-arm interface: we will use a rod or tube to provide support for the hand on the front, and a strap near the other end to provide support for the arm
- Need to get flexible arm strap from Joanne’s
- We need to prototype a new skirt design because the hovercraft has trouble lifting itself up after initially turning on. We liked the performance of Anne’s group’s design so we spoke with them about how to improve our own

5.11.16 - PAC Initial Prototyping, Communications Implementation
- Prototyped PAC hardware including flipper and helmet; PAC is still funny to use
- Tested outputs on scope and both look good
- The flipper might get tiring to use… might need to switch to more sensitive sensor or make it easier through software
- Jet packs are ready for testing just need to lasercut bracket for fan

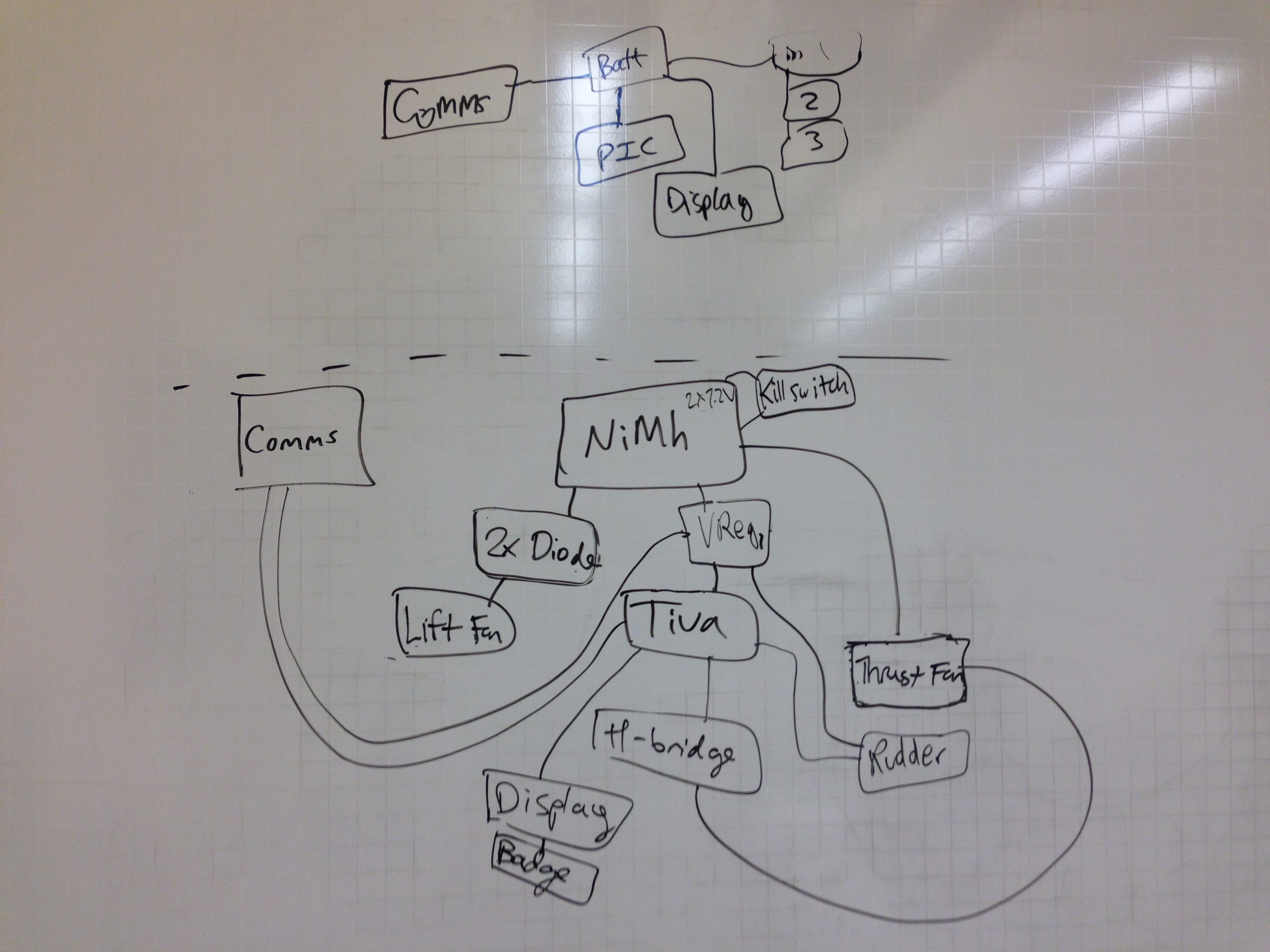
5.10.16 - Finalize Communications, PAC and 3D printed parts arrive
- Discussed power distribution, UART timing, and PIC PWM generation with Ed
- 3D printed parts arrived - tested LED diffusion
- First test drive of hovercraft. Driving is difficult - brainstormed ways to make it simpler through software
- The PAC structure arrived - team shenanigans ensued

5.9.16 - Communications, LOBBYIST Hardware
- Xbees successfully talking to each other
- Successfully transmitted (over Xbees) an encrypted message from Tiva #1 and successfully read and decrypted that message on Tiva #2
- Began writing code for MainLobbyist.c, which is the file that controls the decision making for the Lobbyist (decides what to do with received data, decides when to transmit back to the PAC)
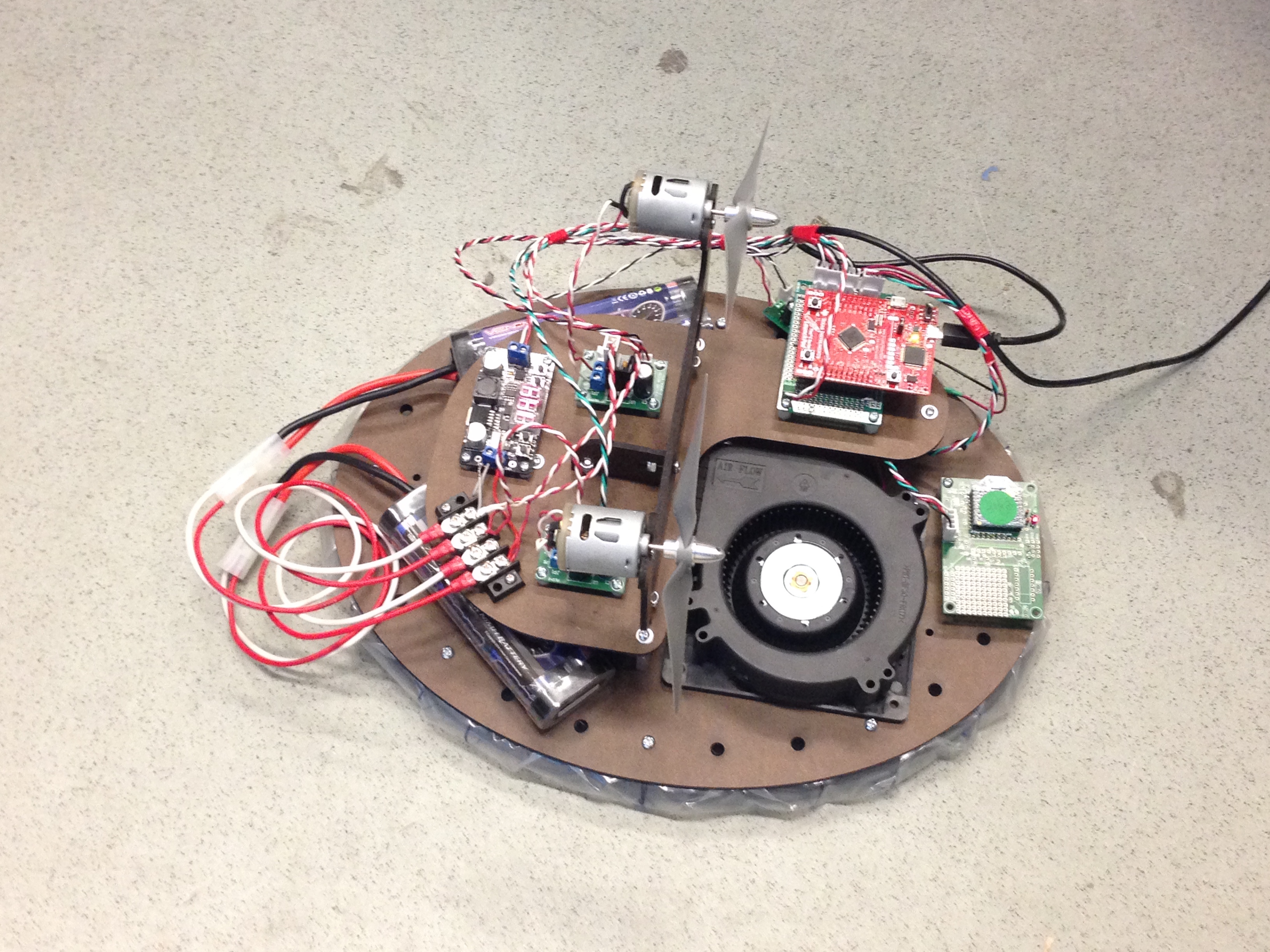
- Circuits for LOBBYIST have been soldered and tested: both lift fan and thrust fans working, however, voltage level sags. We will revise the power distribution and discuss with Ed tomorrow
5.8.16 - Communications, PAC, LOBBYIST
- Working on communications for both PAC and LOBBYIST
- Created schematics for PAC and tested on breadboard, wired sensors
- Tested three different motors to confirm that our TLE Hbridge would be able to handle the current drawn by the motors at two different voltages (7V, 14V)
- Chose motor with lowest gear ratio, drawing about 2A of continuous current with a 6” prop.
5.7.16 - Platform and thrust fan testing
- Tested platform - it is stable and not sensitive to disturbances
- Started CAD for jetpack
- Constructed testbed for thrust fans
5.6.16 - Began Communications, driving servo with PIC
- Wrote pseudo-code to connect two Tivas via Xbees.
- The Tiva-to-Xbee connection used UART to communicate
- Wrote assembly code to handle DMC functionality of electromechanical display when searching for pair
5.5.16 - Communications Meetings 2, 3
- The final draft of the communications protocol was finalized, subject to Ed’s approval
5.4.16 - Hovercraft Base/Skirt Prototyping
- Team used Room 36 to prototype different shapes and skirt designs for the base of the hovercraft
- Features that were found to be beneficial were bases/skirts with smooth geometry (no sharp corners), adding a duct to the lift fan, adding some way to direct the airflow to the edges of the skirt instead of straight downward, adding holes in the skirt at regular intervals to prevent nonideal behavior (riding too high, bouncing, etc)
5.3.16 - Thrust Fans Testing
- Team went to two hobby stores to look for thrust fans and finally found some at AeroMicro.
- The focus was finding motors which were compatible with our TLE H-bridge and props there had a small form-factor
- Initial tests with the fans and props confirm that the ones we purchased will be satisfactory for operating the LOBBYIST:
- Revised checkpoints created for demonstrating functionality
- Prototyped/iterated on platform structure and skirt design until desired hovering and stability was achieved
- Base platform and skirt are oval in shape. A duct is used to distribute air more evenly into the skirt, and small holes in the skirt as used to help alleviate transient pressure differentials that lead to instability.
5.2.16 - Communications Meeting 1
- First communications meeting to create class protocol
- Draft created, need to review with Ed
5.1.16 - Brainstorming Pt. 2 and Project Planning Meeting
- Discussed the milestones we wanted to achieve at the different checkpoints
- Design review slides
- Brainstormed additional concepts for LOBBYIST and PAC themes, and decided on sea turtle with jet-pack
- Finalized steering and propulsion method: two thrust fans will be used
- Finalized PAC sensing modalities, summarized in Design Review Slides
- Created first rough prototype for testing hovercraft and lift fan
4.29.17 - Meeting with Coach
- Met with coach to discuss common pitfalls and ways to avoid them
- Coach advised on propulsion/steering and hoovering methods
4.28.16 - Brainstorming and Architecture Meeting
- Discussed overall goals for the project, brainstormed themes for the LOBBYIST and PAC designs
- Brainstormed ways to satisfy requirements for critical subsystems including: steering, propulsion, and different sensing modalities
Critical Subsystems